
Planetary Analogue Terrain Laboratory (PATLab)Provided by: Space Robotics Research Group, Inst. Mathematics and Physics, Aberystwyth University Homepage: |
Scientific Contact:Dave Barnes – Space Robotics Research Group Email:and M. Grande, L. Tyler, A. Cook – Inst. Mathematics and Physics Computer Science Department Penglais Aberystwyth, Ceredigion SY23 3DB, Wales, UK. Phone 00 44 01970 621561 Fax 00 44 01970 622455 |
Local administrative contact (once a TNA visit is awarded): |
Facility Description
|
A new Planetary Analogue Terrain Laboratory (PATLab) has been created at Aberystwyth University (AU). Funded in part using an award from the UK Higher Education Funding Council for Wales (HEFCW). The aim of the PATLab is to allow comprehensive mission operations emulation experiments to be performed. These trials and experiments are essential when learning how deploy and use a robot science instrument for a given mission, and hence maximise quality scientific data return. Work has resulted in a unique facility that has a terrain region composed of Mars Soil Simulant-D. It includes ‘science target’ rocks that have been fully characterised, and hence we can compare these results with those generated using the PATLab planetary robotics facilities. The terrain has an area for sub-surface sampling. The total floor area of the PATLab is 100 m2, and half of this has been given over to the terrain region. |
 |
PATLab Equipment
|
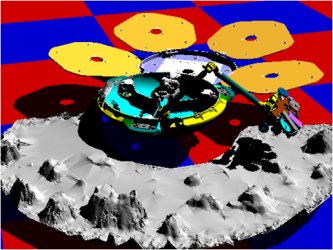
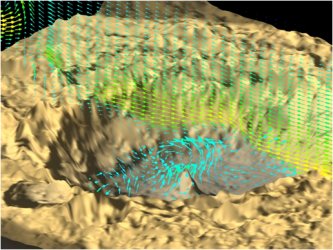
The PATLab terrain has been designed to support a new rover chassis which is based upon the ESA ExoMars rover Concept-E mechanics. The rover has 6 wheel drives, 6 wheels steering, and a 6 wheel walking capability. It is the first rover of its kind to support such functionality. We have mounted an AU designed and built 3 DoF robot arm onto the chassis. The PATLab is heavily instrumented and all data and control facilities are available via high speed links to remote users. Deployment trials have been conducted using the PATLab, for example, using QM versions of the Beagle 2 Rock Corer Grinder, and the Beagle 2 Mole: PLUTO. Based upon COTS cameras we have created a panoramic camera instrument which emulates the proposed ExoMars PanCam. Image capture and machine vision processing algorithms have been implemented and these run on-board a rover chassis small-PC. A pan and tilt mechanism for our PanCam instrument has been designed and built which is attached to a mast structure on our rover chassis. During PATLab. experiments the motion of the rover chassis wheel mechanics, rover attitude, robot arm deployment, and PanCam pan and tilt mechanism can be measured using our Vicon motion capture system. This comprises twelve infra-red cameras, and the Cartesian position of reflective markers placed anywhere with the PATLab terrain region can be tracked in real-time (typically 100 Hz) with a resolution less than 0.1 mm. There is also a Laser Scanner that can create high fidelity terrain DEMs. The PATLab has a large selection of software tools for rover, robot arm and instrument modelling and simulation, for the processing and visualisation of captured instrument data, and for simulating planetary environmental conditions. |
|
Facility References
Selected relevant publications
For information on the Europlanet TNA programme contact:
Professor N J Mason, Department of Physics and Astronomy, The Open University, Walton Hall. Milton Keynes, MK7 6AA
Email (preferred method of contact)